Nach dem die ShapeOko CNC Fräse soweit einsatzbereit ist (es kommen noch ein paar Modifikationen und derzeit fehlt ein wirkliches Fräs-Projekt für den ersten Produktivlauf) wurde es ja fast schon wieder langweilig weshalb ich mich auf die Suche nach einem neuen Bastelprojekt machte. Als Basis sollte es wieder ein Arduino Board sein und so viel die Entscheidung auf ein ArduPilotMega (und nicht auf ein Ambilight für meinen Monitor, der hat inzwischen nur eine statische RGB-LED Beleuchtung erhalten ;)).
ArduPilotMega-Wiebitte? Kurz gesagt, APM ist ein OpenSource Autopilot System. Derzeit gibt es dazu Firmware für Flächenmodelle (ArduPlane), Autos (ArduRover) und Hubschrauber (AuduCopter).
Als Flugmodi stehen zur Verfügung:
- MANUAL (regulärer RC Modus, eine Unterstützung durch APM)
- STABILIZE (Sticks loslassen, Modell wird stabilisiert)
- FLY BY WIRE (APM unterstützt die Steuerung, z.B. werden maximal Werte nicht überschritten)
- AUTO (Modell folgt GPS Wegpunkten selbstständig)

- RTL (Modell kehrt zum Startpunkt zurück und kreist über diesem)
- LOITER (Modell beginnt über der aktuellen Position zu kreisen)
- TAKEOFF (gescriptete Startphase)
- LAND (gescriptete Landephase)
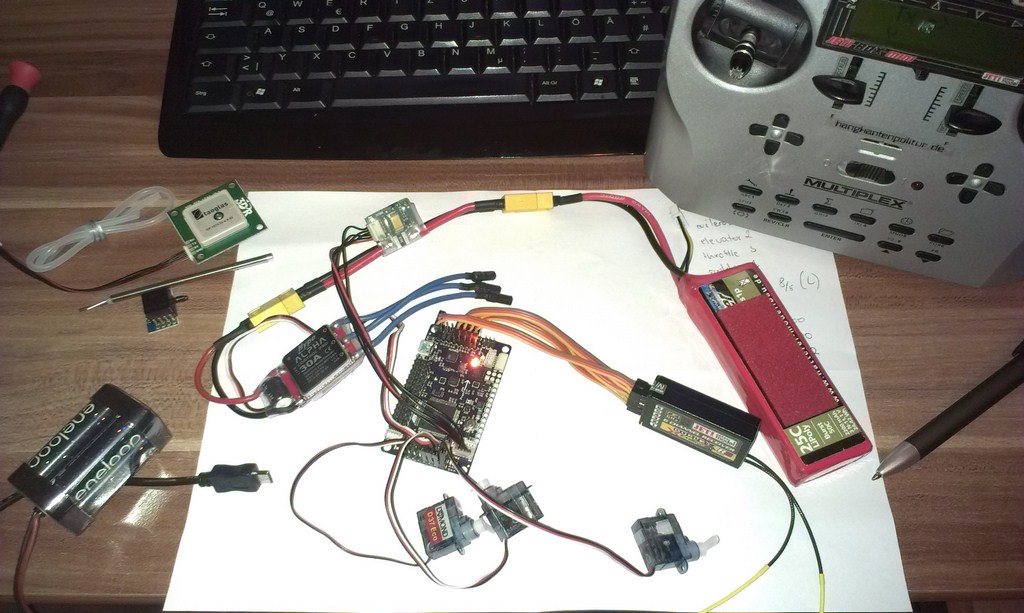
Erster Testaufbau siehe Foto.
Weiter geht das ganze sobald der Versuchsträger dafür da ist (kleines 3 Achs Motormodell), dann geht es ans Scripten und testen – ich halte euch dazu auf dem Laufenden. :-)(Wohin der Weg führen wird kann ich noch gar nicht sagen, erstmal geht es um die technischen Grundlagen… Ein konkreten Anwendungsfall wird sich sicher finden lassen (Quadocopter, FPV, Drone, …).
Foto Update 01.02.2013:
