
Mischer Werte per Drehgeber verändern
In den Kommentaren kam die Frage auf, ob man auch Mischerwerte mit einem Drehgeber beeinflussen kann. Das kann beim Erfliegen der richtigen Werte/Ausschläge hilfreich sein. Als Beispiel habe ich das gerade mal für den Butterfly-Mischer und für einen Freien Mischer umgesetzt.
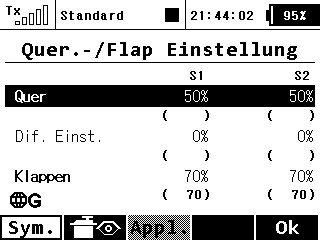
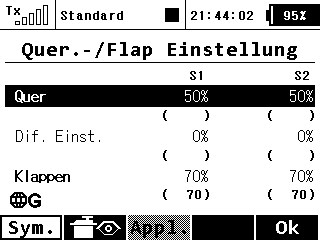
Grundlage ist natürlich ein 4 Klappenmodell, sonst fehlt der Butterfly Mischer. In diesem stellen wir in den Quer.-/Flap Einstellungen ein das die QR 50% und die Klappen um 70% ausgefahren werden sollen. In dem Beispiel ignoriere ich mal Drehrichtungen und Servomitten, diese müssen natürlich entsprechend eingestellt werden.
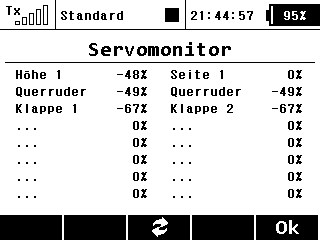
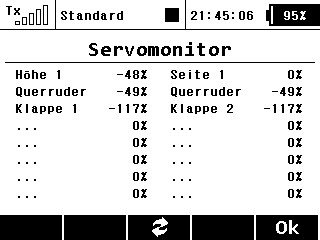
Danach gehen wir in die Feineinstellung und weisen diese Option dem Drehgeber P7 zu. Unten kann dann eingestellt werden mit welchem maximalen Wert eine Funktion beeinflusst werden soll, in dem Beispiel die Klappen um +50%.
Im Servomonitor kann man diesen Effekt dann schön beobachten:
Das gleiche kann bei Freien Mischern auch umgesetzt werden:
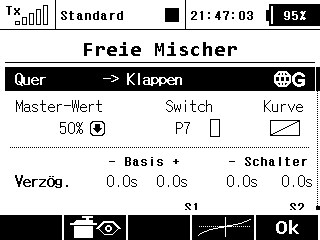
In diesem Beispiel mische ich die Klappen zu dem Querruder, der Maximal Wert ist 50% Weg. Dies kann auch mit dem Drehgeber P7 im Flug direkt verstellt werden.
Umsteiger Tipps – Oder: Warum steuert sich mein Modell nun so knackig?
Gleich beim Erstflug mit dem Jetisender fiel mir auf, dass alle Steuerreaktionen deutlich knackiger als wie mit der Multiplex Evo kommen. Bereits bei der Programmierung merkte ich auch, dass man die Prozentwerte der beiden Anlagen nicht direkt übertragen kann. Nachdem Graupner Besitzer von gleichen Erlebnissen berichtet haben wurden einige im Jetiforum aktiv und haben haben die Urache gefunden.
Graupner / Multiplex gibt bei 100% Servoweg ein 1.9ms Signal aus. Bei Jeti entsprechen 1.9 ms jedoch “nur” 80% und 100% sind dann 2.0 ms.
Wenn man nun direkt umsteigen will gibt es zwei Varianten: Entweder alle Servowege in dem Jeti Sender auf 80% limitieren, dann können die ursprünglichen Werte 1:1 übernommen werden oder man multipliziert alle bisherigen Werte mit 0.8.
Wenn man, wie ich, die Ruderwege neu ausmisst muss man jedoch die Dual Rate und Expo Werte etwas anpassen, hier ist 15% weniger bei Dual Rate und 20% mehr bei Expo ein guter Anhaltspunkt.
Tipp: Mit der Jetibox kann man sich die Impulsrate auch am alten Sender anschauen und dann entsprechend den Weg im neuen Sender einstellen.
Stoppuhren / Timer – Beep1, Beep2, Sprache?
Wenn man eine Stoppuhr anlegt kann man in den Uhreneinstellungen verschiedene Arten der Signalisierung auswählen: Keine, Beep 1, Beep 2 und Sprache.
Im Verzeichnis Config auf der internen SD Karte findet man die JSON-Dateien welche die Signalisierung definieren. Schauen wir uns also mal die TimerB1.jsn Datei etwas genauer an:
[
{"Time":-60,"Type":1,"Freq":4000,"Cnt":1,"Length":200},
{"Time":-50,"Type":1,"Freq":4000,"Cnt":1,"Length":200},
{"Time":-40,"Type":1,"Freq":4000,"Cnt":1,"Length":200},
{"Time":-30,"Type":1,"Freq":4000,"Cnt":3,"Length":200},
{"Time":-20,"Type":1,"Freq":4000,"Cnt":2,"Length":200},
{"Time":-10,"Type":1,"Freq":4000,"Cnt":1,"Length":200},
{"Time":-9,"Type":1,"Freq":4000,"Cnt":1,"Length":200},
{"Time":-8,"Type":1,"Freq":4000,"Cnt":1,"Length":200},
{"Time":-7,"Type":1,"Freq":4000,"Cnt":1,"Length":200},
{"Time":-6,"Type":1,"Freq":4000,"Cnt":1,"Length":200},
{"Time":-5,"Type":1,"Freq":5000,"Cnt":1,"Length":200},
{"Time":-4,"Type":1,"Freq":5000,"Cnt":1,"Length":200},
{"Time":-3,"Type":1,"Freq":5000,"Cnt":1,"Length":200},
{"Time":-2,"Type":1,"Freq":5000,"Cnt":1,"Length":200},
{"Time":-1,"Type":1,"Freq":5000,"Cnt":1,"Length":200},
{"Time":0,"Type":1,"Freq":5000,"Cnt":1,"Length":1000}
]
Hier sehen wir, dass Beep 1 so funktioniert dass bei einer Restzeit von 60 Sekunden (Time) ein Piep (Type 1) mit 4000 Hz Tonhöhe (Freq) und 200 ms Länge (Length) einmal gespielt wird (Cnt).
Dies wiederholt sich bei 50 und 40 Sekunden. Bei einer Restzeit von 30 Sekunden werden 3 Töne ausgegeben, bei 20 Sekunden dann zwei Töne und ab 10 Sekunden wird pro Sekunde ein Ton ausgegeben. Die Tonhöhe steigt dann in den letzten 5 Sekunden an und die Sequenz wird mit einem 5000 Hz Ton von einer Sekunde Länge beendet.
Beep 2 unterscheidet sich zu Beep 1 dadurch, dass schon ab 5 Minuten Restlautzeit eine Signalisierung erfolgt. Bei -300 Sekunden wird ein 2000 Hz Ton erzeugt, gefolgt von fünf 5000 Hz Tönen. Bei -240 Sekunden dann das selbe jedoch mit vier 5000 Hz Tönen. Das geht dann so weiter bis zu den letzten 60 Sekunden die dann wie bei Beep 1 signalisiert werden.
Und Sprache? Hier gibt es die Signalisierung Sprache welcher die JSON Datei TimerV.jsn zu Grunde liegt:
[
{"Time":-300,"Type":2,"File":"5min.wav"},
{"Time":-240,"Type":2,"File":"4min.wav"},
....
Sollen WAV Dateien abgespielt werden werden die Schlüssel „Cnt“, „Length“ und „Freq“ natürlich nicht mehr benötigt, stattdessen muss der Schlüssel „File“ deklariert werden. Wichtig ist auch, das „Type“ den Wert „2“ zugewiesen wird.
Auf meine Rückfrage bei Jeti ob man die JSON Dateien bearbeiten darf, bekam ich folgende Aussage:
„…that’s why these files are there – you can freely edit these files and then assign the appropriate timer profile. There is a limit of maximum audible items for the timer profile – ca 40 events in total available for each file. Just keep the syntax correct and after you upload the new files to the transmitter, a restart is always needed.“
Derzeit können jedoch nur die drei vorhandenen Profile bearbeitet werden. Mal sehen ob das mit einem künftigen Update ausgebaut wird, den entsprechenden Wunsch habe ich bei Jeti eingeworfen. :)
TX Frequency – 100Hz oder 50Hz / Output Groups
Mit der neuen Sendersoftware 2.0 hat Jeti die Möglichkeit eingebaut, die Frame-Rate zu verändern. Arbeitete Jeti Duplex bislang mit 50Hz kann nun im Sender (Option „TX Frequency“) auch auf 100Hz umgestellt werden. Dies kann bei Digital Servos zu weicheren Bewegungen führen. Dabei gilt zu beachten, dass der Empfänger als Outputperiod den Wert „Auto“ odr „By Transmitter“ eingestellt hat.
Was bedeutet dies nun konkret? Die bisherigen 50Hz bedeuten, dass alle 20ms ein Steuersignal vom Sender zum Empfänger geschickt wird. Bei 100Hz verkürzt sich dieser Interval auf 10ms. Die bisher verwendeten 50Hz entsprechen den 20ms langen PPM Summensignalen welche früher bei 35MHz Anlagen zur Übertragung verwendet wurden.
Neu sind auch Servogruppen mit welchen man Servos logisch zusammenfassen kann. Dies kann zum Beispiel Sinn machen, wenn man zwei Servos am gleichen Ruder verwendet. Bei PPM war es früher so, das jedes Servo seinen Steuerimpuls nach einander erhalten hat, bei 2.4GHz erhält der Empfänger nur noch ein Datenpaket in welchem alle Servopositionen mit übertragen werden. Dies bedeutet, daß hier alle Servos gleichzeitig auf ihre Position gehen und das ist auch der Knackpunkt vor allem bei Digital Servos. Wenn alle Servos auf einmal loslaufen können extreme Stromspitzen entstehen, was bei 35MHz durch die sequenzielle Ansteuerung umgangen wurde. Eine solche Spannungsspitze kann im ungünstigsten Fall sogar einen Empfänger Reset auslösen, mit bekannten Folgen.
Mit den Servogruppen kann man nun jedoch Servos zusammenfassen und diese werden dann nacheinander angesteuert. Hat man zum Beispiel zwei Servos auf dem Höhenruder, kann man diese als Servogruppe 1 und alle Querruderservos als Servogruppe 2 deklarieren. Bei einem Steuerimpuls wird dann zuerst der Höhenruder und nach einer kurzen Pause das Querruder angesteuert.
Ein abschliessendes Wort noch zu den 20ms damit jeder einen Vergleich hat: Ein menschlicher Wimpernschlag dauert etwa 100ms. Die meisten sich daher sicher gut damit beraten, den Sender und die Empfänger auf den Jeti Einstellungen zu belassen.
Weiterführende Links:
- Messungen zum Thema 100Hz und PPM Output
- Latenz – Output Period und sonstige Missverständnisse
- Output-Groups, Output-Rate und TX Frequency
6 Schaltstufen über zwei Schalter realisieren (ArduPilot, Pixhawk, …)
Für die Ansteuerung von Multicopter Steuerungen wie zum Beispiel einer Pixhawk Steuerung werden mehrere Schaltstufen benötigt. Auf einem Servokanal müssen folgende Werte ausgegeben werden: 1165, 1295, 1425, 1555, 1685, and 1815 milliseconds.
Hierfür werden 5 zusätzliche Flugphasen angelegt und entsprechend zwei Schaltern zugewiesen damit alle der Reihe nach durchgeschaltet werden können. Dann wird eine neue Funktion „Pixhawk“ angelegt und einem Servokanal zugewiesen.
Nun benötigen wir für die Ausgabewerte eine Funktionskurve „Kontant“.
Die Funktionskurve wird als erstes von Global auf Separat gestellt. Mit Hilfe des Servomonitors können wir nun die %-Werte pro Flugphase so verändern, bis die Ausgabewerte passen. (-100% = 1000 ms ; 0% = 1500 ms ; 100% = 2000 ms)
<– Kapitel 07 |
